平衡机
balancing machine
测量旋转物体(转子)不平衡量大小和位置的机器。根据平衡机测出的数据对转子的不平衡量进行校正,可改善转子相对于轴线的质量分布,使转子旋转时产生的振动或作用于轴承上的振动力减少到允许的范围之内。通常,转子的平衡包括不平衡量的测量和校正两个步骤,平衡机主要用于不平衡量的测量,而不平衡量的校正(一般在转子上减少或增加质量)则往往借助于如钻床 铣床和点焊机等其他辅助设备或用手工方法完成。有些平衡机已将校正装置做成为平衡机的一个部分。
铣床和点焊机等其他辅助设备或用手工方法完成。有些平衡机已将校正装置做成为平衡机的一个部分。
任何转子在围绕其轴线旋转时,由于相对于轴线的质量分布不均匀而产生离心力。这种不平衡离心力作用在转子轴承上会引起振动、产生噪声和加速轴承磨损,以致严重影响产品的性能和使用寿命。电机转子、机床主轴、内燃机曲轴、汽轮机转子、陀螺转子和钟表摆轮等旋转零部件在制造过程中,都需要经过平衡才能平稳正常地运转。平衡机已成为减小振动、改善性能和提高质量的必不可少的设备。
分类 图1 [平衡机的分类]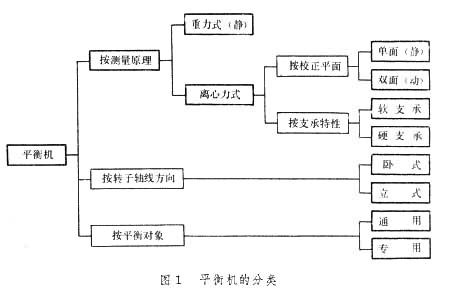 为平衡机的分类。平衡机还可以按照被平衡转子的质量、不平衡量的测量方式、指示方式和校正方式等进行分类。离心力式平衡机还可以按驱动转子的方式进行分类。
为平衡机的分类。平衡机还可以按照被平衡转子的质量、不平衡量的测量方式、指示方式和校正方式等进行分类。离心力式平衡机还可以按驱动转子的方式进行分类。
原理和结构 重力式平衡机和离心力式平衡机是两类典型的平衡机。
重力式平衡机 一般称为静平衡机。它是依赖转子自身的重力作用来测量静不平衡的(图2 [重力式平衡机原理图]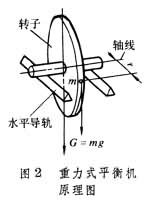 )。置于两根水平导轨上的转子如有不平衡量
)。置于两根水平导轨上的转子如有不平衡量 ,则它对轴线的重力矩
,则它对轴线的重力矩 ·
· 使转子在导轨上滚动,直至处于更低位置时才静止。图3[重力式平衡机的结构示意图]
使转子在导轨上滚动,直至处于更低位置时才静止。图3[重力式平衡机的结构示意图]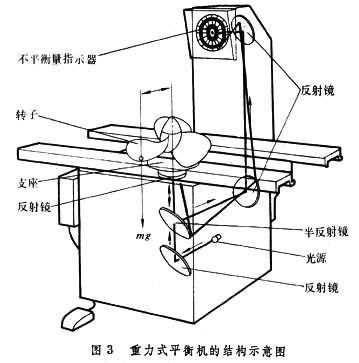 是重力式平衡机的结构示意图。被平衡的转子放在用静承支承的支座上,在支座的下面嵌装一片反射镜。当转子不存在不平衡量时,由光源射出的光束经此反射镜反射后,投射在不平衡量指示器的更坐标原点。如果转子存在不平衡量 ,则转子支座在不平衡量的重力矩·作用下发生倾斜,支座下的反射镜也随之倾斜并使反射出的光束偏转,这样光束投在更坐标指示器上的光点便离开原点。根据这个光点偏转的坐标位置,可以得到不平衡量的大小和位置。
是重力式平衡机的结构示意图。被平衡的转子放在用静承支承的支座上,在支座的下面嵌装一片反射镜。当转子不存在不平衡量时,由光源射出的光束经此反射镜反射后,投射在不平衡量指示器的更坐标原点。如果转子存在不平衡量 ,则转子支座在不平衡量的重力矩·作用下发生倾斜,支座下的反射镜也随之倾斜并使反射出的光束偏转,这样光束投在更坐标指示器上的光点便离开原点。根据这个光点偏转的坐标位置,可以得到不平衡量的大小和位置。
重力式平衡机仅适用于某些平衡要求不高的盘状零件。对于平衡要求高的转子,一般采用离心式单面或双面平衡机。
离心力式平衡机 这种平衡机在转子旋转的状态下,根据转子不平衡引起的支承振动或作用于支承的振动力测量不平衡。按校正平面可分为单面平衡机和双面平衡机。单面平衡机只能测量一个平面上的不平衡(静不平衡),它虽然是在转子旋转时进行测量,但仍属于静平衡机。双面平衡机能测量动不平衡,也能分别测量静不平衡和偶不平衡,一般称为动平衡机。
图4 [通用卧式动平衡机的典型结构]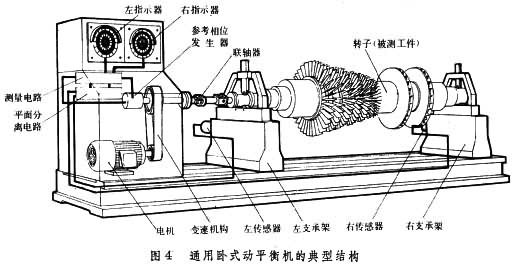 为通用卧式动平衡机的典型结构。被平衡的转子放置在左、右支承架上。电动机经变速机构、联轴器驱动转子旋转。转子不平衡产生的支承振动或振动力由左、右传感器转换成相应的电信号,经过平面分离电路处理后,输出信号分别与左、右校正平面上的不平衡量有关。同时,与转子同轴旋转的参考相位发生器发出参考信号。上述两种信号同时输入测量电路,经滤波、放大后检测出左、右校正平面上不平衡量的大小和位置,并分别在左、右指示器上指示出来。
为通用卧式动平衡机的典型结构。被平衡的转子放置在左、右支承架上。电动机经变速机构、联轴器驱动转子旋转。转子不平衡产生的支承振动或振动力由左、右传感器转换成相应的电信号,经过平面分离电路处理后,输出信号分别与左、右校正平面上的不平衡量有关。同时,与转子同轴旋转的参考相位发生器发出参考信号。上述两种信号同时输入测量电路,经滤波、放大后检测出左、右校正平面上不平衡量的大小和位置,并分别在左、右指示器上指示出来。
离心力式平衡机按支承特性不同又可分为软支承平衡机和硬支承平衡机。平衡转速高于转子-支承系统固有频率的称为软支承平衡机。这种平衡机的支承刚度小,传感器检测出的信号与支承的振动位移成正比。平衡转速低於转子-支承系统固有频率的称为硬支承平衡机。这种平衡机的支承刚度大,传感器检测出的信号与支承的振动力成正比。
性能指标 平衡机的主要性能用更小可达剩余不平衡量和不平衡量减少率两项综合指标表示。前者是平衡机能使转子达到的剩余不平衡量的更小值,它是衡量平衡机更高平衡能力的指标,一般用 g.mm/kg(克毫米每千克)来表示;后者是经过一次校正后所减少的不平衡量与初始不平衡量之比,它是衡量平衡效率的指标,一般用百分数表示。
进展 由于挠性转子的广泛应用,已研制出挠性转子平衡机。这类平衡机与平衡刚性转子的离心力式平衡机比较有如下特点:必须在转子工作转速范围内进行无级调速;除能测量支承的振动或振动力外,还能测量转子的挠曲变形。
挠性转子平衡机有时安装在真空防护室内,以适合汽轮机之类转子的平衡,它配备有抽真空系统、润滑系统、润滑油除气系统和数据处理用计算机系统等庞大的辅助设备。
根据大批量生产的需要,对特定的转子能自动完成平衡测量和平衡校正的自动平衡机和平衡自动线,也已装备在汽车制造、电机制造等工业部门。
参考书目
HattoSchneider, Auswuchttechnik, VDI-Verlag GmbH Verla g des Vereins,Düsseldorf,1977.
朱晓农
 产品展示
产品展示 联系我们
联系我们 www.newzl.cn
www.newzl.cn 13913665288
13913665288 215500
215500 江苏省-常熟市
江苏省-常熟市



